

2008年07月18日
くるくる ぱーてぃくる ローカル座標 その4
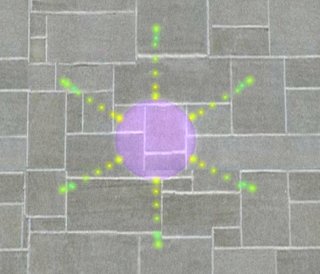
円周の周辺に配置してある 6個のプリムから同じ角度で外へ向けて パーティクルを放出する。
(1本の直線・方向のみ、同じ速さ。 同じおおきさ。)
ここで、プリムが角度を変えれば、 パーティクルを放出する角度も変えることができます。
(パーティクルシステムのパラメータ数値の調整でも、 パーティクルを放出する角度・形も調整や工夫が検討できます。)
グローバル座標で実施すれば、同じ方向になります。
ローカル座標であることを検討して、 いつも放射状になるように実施しましょう。
位置は、変化しないので、 ROT回転だけを同時に変更します。
それぞれの子プリムは、Z軸で 60度間隔で 親プリムから回転した配置になっています。

角度X=0度で 真上 円周の外方向が 正 内側へ 負 の数値になります、
子プリムの黄色面の方向にパーティクルを出しています、 子プリムの角度をかえることで、パーティクルの方向が変化します

角度Xを変更するためには、 親プリムからの配置が 異なるので、それぞれのプリムは向きが異なります、計算したい角度Xと Z軸の配置された角度を、 掛け算して計算して求められます。
親ぷりむ(中心の円盤)をTARGETOMEGA でユックリ回転させても、 ローカル座標として変更するので、 影響なく動作します。
ターゲットの変更設定できるので ランダムで、リンクプリムのUUIDへ向かっています、
隣のリンクプリムへ向かったり 対角線へ向かったりと切り替えます、
(1本の直線・方向のみ、同じ速さ。 同じおおきさ。)
ここで、プリムが角度を変えれば、 パーティクルを放出する角度も変えることができます。
(パーティクルシステムのパラメータ数値の調整でも、 パーティクルを放出する角度・形も調整や工夫が検討できます。)
グローバル座標で実施すれば、同じ方向になります。
ローカル座標であることを検討して、 いつも放射状になるように実施しましょう。
位置は、変化しないので、 ROT回転だけを同時に変更します。
それぞれの子プリムは、Z軸で 60度間隔で 親プリムから回転した配置になっています。

角度X=0度で 真上 円周の外方向が 正 内側へ 負 の数値になります、
子プリムの黄色面の方向にパーティクルを出しています、 子プリムの角度をかえることで、パーティクルの方向が変化します

角度Xを変更するためには、 親プリムからの配置が 異なるので、それぞれのプリムは向きが異なります、計算したい角度Xと Z軸の配置された角度を、 掛け算して計算して求められます。
親ぷりむ(中心の円盤)をTARGETOMEGA でユックリ回転させても、 ローカル座標として変更するので、 影響なく動作します。


ターゲットの変更設定できるので ランダムで、リンクプリムのUUIDへ向かっています、
隣のリンクプリムへ向かったり 対角線へ向かったりと切り替えます、



角度Xを変更 num:-90~90をタイマーで変更させます、 子プリムの向きは、
llSetLocalRot(llEuler2Rot(<num,0,0>*DEG_TO_RAD));//親プリム から Z軸回転 0度
llSetLocalRot(llEuler2Rot(<num,0,0>*DEG_TO_RAD)*llEuler2Rot(<0,0,60>*DEG_TO_RAD));
//親プリム から Z軸回転 60度
llSetLocalRot(llEuler2Rot(<num,0,0>*DEG_TO_RAD)*llEuler2Rot(<0,0,120>*DEG_TO_RAD));
//親プリム から Z軸回転 120度
。。。
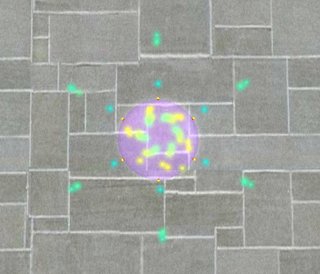
色変化は中間色多めで12個 、SPEED4個、ターゲットが設定は0~5 自分を含めて子リンクプリムのUUIDへ向かっています
親ぷりむ(中心の円盤)をTARGETOMEGA でユックリ正回転 逆回転 は乱数。
かなり複数の組み合わせで 演出できている感じになりました^^b
パーティクルはプリムの追跡をTRUEにしてあります
(プリムの動作に追跡しています、反転すると同時に反転しています、 FALSEであれば、単純にターゲットへ向かいます)
cadeは バグるので 文字<> になってます

Posted by しんいち at 13:51│Comments(0)
│ローカル座標